tristan12
Ouvrier
Bonjour, je vous présente mon projet de CNC.
Je me suis inspiré d’autres projets vu sur le forum dont un en particulier pour l’architecture de la machine projet de Pa_ul.
Le bâti est constitué de 4 éléments (en tube ep 10) mécano-soudé qui sont ensuite assemblés vissés (plus facile d’usiner 4 petits morceaux plutôt qu’un gros pour moi).
Le chariot Y, le coulant Z et la table du X sont en alu (plaque ep30).



Une bonne partie de ma matière est de récup ainsi que les guidages (rail/patin), j’ai donc adapté la conception en fonction.
Après la mécano soudure je compte faire une stabilisation thermique puis usinage des portées de rails / VAB …
Je prévois au cas ou de laisser des ouvertures sur les bouchons de tubes pour éventuellement y couler du béton ou de la résine si jamais le bâti vibre trop lors de l’usinage.
Je pense acheter une broche chinoise 2.2kw refroidi par eau sachant que je compte usiner principalement de l’aluminium.
Voici les courses de la machine :
X : 500
Y : 310
Z : 200
Estimation de la masse de la machine : 250kg
La machine devra être fixée sur une table suffisamment rigide (pas encore défini)
Avant de passer commande de tout ce qui est commerce je compte sur la communauté du forum pour m’aiguiller sur certain choix. (pour info j’ai plus de lacune dans les parties câblage / programmation / automatisme que dans les parties purement mécanique)
J’oublie un détail qui a son importance, budget max: 1500€
Voici la liste des principaux éléments :
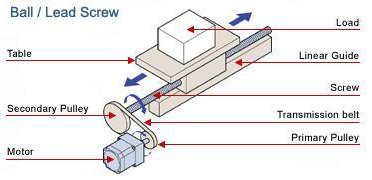
VIS A BILLES :
Je ne suis pas très chaud pour passer en écrou double pour 2 raisons :
- Le prix
- Je ne suis pas sûr que les fabricant chinois applique vraiment une précontrainte entre les deux écrous
- Vitesse nominale VAB chinoise 600-800rpm (info trouvé sur le forum)
Donc avance limité à 4m/min avec pas de 5 (en théorie)…
- A voir en fonction du choix driver/moteur (vitesse max)
DRIVER / MOTEUR :
Mes besoins :
Vitesse max : au moins 1500tr/min
Couple max : au moins 3N.m
Choix NEMA 24 (ou 23) : encombrement faible, peut être mis en direct sur VAB (pas obligé de faire un montage avec pignon/courroie pour déporter le moteur)
J’ai tendance à m’orienter vers un asservissement en boucle fermé (closed loop) car la perte de pas me fait un peu peur.
La différence de prix justifie t’elle le gain de passer en boucle fermé plutôt que ouverte ?
ACHAT : en général moteur et driver sont vendu en kit sur ebay ou aliexpress : il s’agit de contrefaçon de LEADSHINE pour les drivers et pas d’info sur les moteurs (pas de REF ni de courbe de couple/vitesse) à à fuir forcement ou y’a-t-il des membres du forum qui ont acheté et qui en sont satisfait ?
ALIM :
Choisir tension max supportée par les drivers pour avoir la meilleur vitesse sur les moteurs.
Choisir une grosse alim ou plusieurs petites ? (ou aucune importance ?)
CARTE CONTROLLEUR :
COMMANDE DEPORTEE :
Boitier avec potar vitesse / choix axes / départ cycle / ARU
Utilisation : Permet de se positionner en manuel pour définir l’origine du programme d’usinage sans être à coté du pc?
Utilisation d’une pinule électronique quasi obligatoire ou pas ?
CABLAGE :
Question câble blindé pour éviter les parasites : uniquement le câble de puissance de la broche ?
------------------------
Ça fait beaucoup de questions d'un coup !
Je me suis inspiré d’autres projets vu sur le forum dont un en particulier pour l’architecture de la machine projet de Pa_ul.
Le bâti est constitué de 4 éléments (en tube ep 10) mécano-soudé qui sont ensuite assemblés vissés (plus facile d’usiner 4 petits morceaux plutôt qu’un gros pour moi).
Le chariot Y, le coulant Z et la table du X sont en alu (plaque ep30).
Une bonne partie de ma matière est de récup ainsi que les guidages (rail/patin), j’ai donc adapté la conception en fonction.
Après la mécano soudure je compte faire une stabilisation thermique puis usinage des portées de rails / VAB …
Je prévois au cas ou de laisser des ouvertures sur les bouchons de tubes pour éventuellement y couler du béton ou de la résine si jamais le bâti vibre trop lors de l’usinage.
Je pense acheter une broche chinoise 2.2kw refroidi par eau sachant que je compte usiner principalement de l’aluminium.
Voici les courses de la machine :
X : 500
Y : 310
Z : 200
Estimation de la masse de la machine : 250kg
La machine devra être fixée sur une table suffisamment rigide (pas encore défini)
Avant de passer commande de tout ce qui est commerce je compte sur la communauté du forum pour m’aiguiller sur certain choix. (pour info j’ai plus de lacune dans les parties câblage / programmation / automatisme que dans les parties purement mécanique)
J’oublie un détail qui a son importance, budget max: 1500€
Voici la liste des principaux éléments :
VIS A BILLES :
- Ecrou simple ou double avec précontrainte ?
Je ne suis pas très chaud pour passer en écrou double pour 2 raisons :
- Le prix
- Je ne suis pas sûr que les fabricant chinois applique vraiment une précontrainte entre les deux écrous
- Choix du pas 5 ou 10 (Ø16): (avance rapide souhaité : 15m/min)
- Vitesse nominale VAB chinoise 600-800rpm (info trouvé sur le forum)
Donc avance limité à 4m/min avec pas de 5 (en théorie)…
- A voir en fonction du choix driver/moteur (vitesse max)
DRIVER / MOTEUR :
Mes besoins :
Vitesse max : au moins 1500tr/min
Couple max : au moins 3N.m
Choix NEMA 24 (ou 23) : encombrement faible, peut être mis en direct sur VAB (pas obligé de faire un montage avec pignon/courroie pour déporter le moteur)
J’ai tendance à m’orienter vers un asservissement en boucle fermé (closed loop) car la perte de pas me fait un peu peur.
La différence de prix justifie t’elle le gain de passer en boucle fermé plutôt que ouverte ?
ACHAT : en général moteur et driver sont vendu en kit sur ebay ou aliexpress : il s’agit de contrefaçon de LEADSHINE pour les drivers et pas d’info sur les moteurs (pas de REF ni de courbe de couple/vitesse) à à fuir forcement ou y’a-t-il des membres du forum qui ont acheté et qui en sont satisfait ?
ALIM :
Choisir tension max supportée par les drivers pour avoir la meilleur vitesse sur les moteurs.
Choisir une grosse alim ou plusieurs petites ? (ou aucune importance ?)
CARTE CONTROLLEUR :
- NVEM : beaucoup d’avis négatifs sur le forum
- XHC : ?
- CS-LAB : plug and play , par contre cher (300€)
- smoothstepper warp9 : ?
COMMANDE DEPORTEE :
Boitier avec potar vitesse / choix axes / départ cycle / ARU
Utilisation : Permet de se positionner en manuel pour définir l’origine du programme d’usinage sans être à coté du pc?
Utilisation d’une pinule électronique quasi obligatoire ou pas ?
CABLAGE :
Question câble blindé pour éviter les parasites : uniquement le câble de puissance de la broche ?
------------------------
Ça fait beaucoup de questions d'un coup !
Dernière édition: